Material Required
- Printoo Core
- DC Motors Drivers & two Motors
- Bluetooth 4.0 Module
- Solar Cell Connector
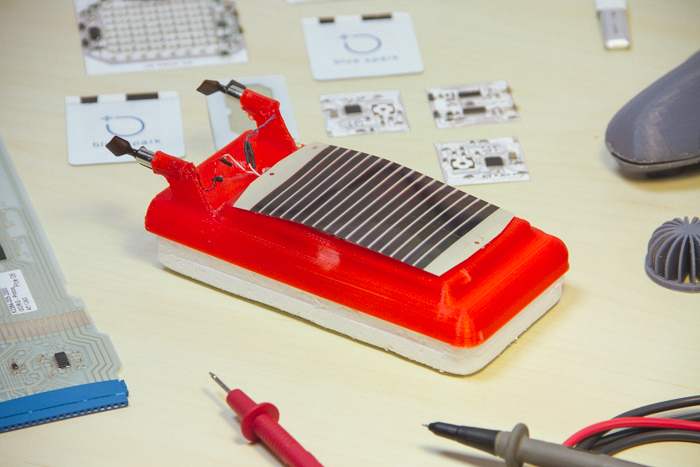
- Mekoprint Polymer Solar Cell
- LiPo battery
- Smartphone
- 3D Printer: https://www.beeverycreative.com/
Schematic
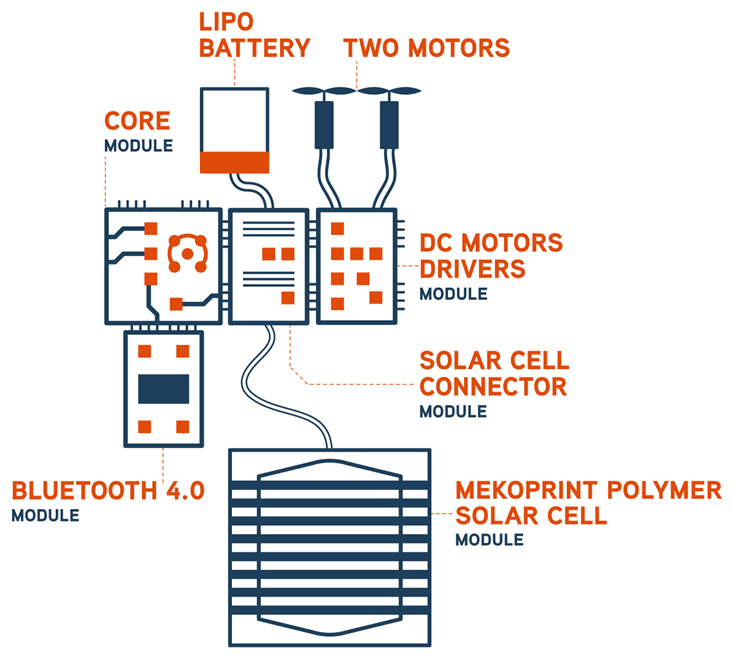
Schematic: 3D Printed Hovercraft
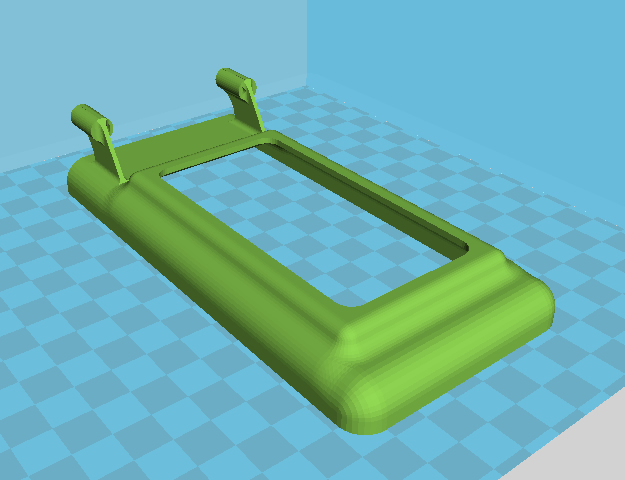
3D Model
Code
- /**********************************************************************
- * © 2014 YD Ynvisible, S.A.
- *
- * FileName: Hovercraft.ino
- * Dependencies: SoftwareSerial.h
- * Processor: ATmega328
- * IDE: Arduino 1.0.5
- *
- * Description:
- * Driving a 2 motors aquatic drone through a smartphone via Bluetooth 4.0
- * We used the LightBlue Bluetooth 4.0 terminal for iPhone for control
- **********************************************************************/
- #include <SoftwareSerial.h> //Software Serial Port
- #define RxD 6 //Bluetooth TX=Core RX
- #define TxD 7 //Bluetooth RX=Core TX
- #define FRONT 1
- #define BACK 0
- #define OFF 0
- #define ON 1
- SoftwareSerial blueToothSerial(RxD,TxD);
- int motor1_pwm=9;
- int motor1_dir=8;
- int motor2_pwm=11;
- int motor2_dir=12;
- char X[3], Y[3], A, B;
- int X1_num;
- int i=1;
- int X_num,Y_num, A_num, B_num;
- int X_numf,Y_numf, A_numf, B_numf;
- int motor1_way,motor2_way;
- char recvChar;
- void setup()
- {
- Serial.begin(9600);
- //pinMode(BUTTON, INPUT);
- pinMode(RxD, INPUT);
- pinMode(TxD, OUTPUT);
- pinMode(motor1_pwm, OUTPUT); //Motor1 PWM
- pinMode(motor1_dir, OUTPUT); //Motor1
- pinMode(motor2_pwm, OUTPUT); //Motor2 PWM
- pinMode(motor2_dir, OUTPUT); //Motor3
- digitalWrite(motor1_pwm,LOW);
- digitalWrite(motor1_dir,LOW);
- digitalWrite(motor2_pwm,LOW);
- digitalWrite(motor2_dir,LOW);
- setupBlueToothConnection();
- }
- void loop()
- {
- if(blueToothSerial.available()){ //check if the pipe is free
- recvChar = blueToothSerial.read();
- switch (recvChar){
- case '#': //go forward
- analogWrite(motor1_pwm,150);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,150);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- analogWrite(motor1_pwm,180);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,180);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- break;
- case 'r': //go right
- analogWrite(motor1_pwm,150);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,0);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- analogWrite(motor1_pwm,180);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,0);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- break;
- case 'l': //go left
- analogWrite(motor1_pwm,0);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,150);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- analogWrite(motor1_pwm,0);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,180);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- break;
- case 's': //stop
- analogWrite(motor1_pwm,0);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,0);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- analogWrite(motor1_pwm,0);
- digitalWrite(motor1_dir,LOW);
- analogWrite(motor2_pwm,0);
- digitalWrite(motor2_dir,LOW);
- delay(250);
- break;
- default: break;
- }
- }
- }
- void setupBlueToothConnection(){
- blueToothSerial.begin(9600); //Set BluetoothBee BaudRate to default baud rate 9600
- delay(10); // This delay is required.
- blueToothSerial.print("AT+RENEW"); //Restore all setup value to factory setup
- delay(10); // This delay is required.
- blueToothSerial.print("AT+ROLE0"); //make it a slave
- delay(10); // This delay is required.
- }
- //END
/**********************************************************************
* © 2014 YD Ynvisible, S.A.
*
* FileName: Hovercraft.ino
* Dependencies: SoftwareSerial.h
* Processor: ATmega328
* IDE: Arduino 1.0.5
*
* Description:
* Driving a 2 motors aquatic drone through a smartphone via Bluetooth 4.0
* We used the LightBlue Bluetooth 4.0 terminal for iPhone for control
**********************************************************************/
#include <SoftwareSerial.h> //Software Serial Port
#define RxD 6 //Bluetooth TX=Core RX
#define TxD 7 //Bluetooth RX=Core TX
#define FRONT 1
#define BACK 0
#define OFF 0
#define ON 1
SoftwareSerial blueToothSerial(RxD,TxD);
int motor1_pwm=9;
int motor1_dir=8;
int motor2_pwm=11;
int motor2_dir=12;
char X[3], Y[3], A, B;
int X1_num;
int i=1;
int X_num,Y_num, A_num, B_num;
int X_numf,Y_numf, A_numf, B_numf;
int motor1_way,motor2_way;
char recvChar;
void setup()
{
Serial.begin(9600);
//pinMode(BUTTON, INPUT);
pinMode(RxD, INPUT);
pinMode(TxD, OUTPUT);
pinMode(motor1_pwm, OUTPUT); //Motor1 PWM
pinMode(motor1_dir, OUTPUT); //Motor1
pinMode(motor2_pwm, OUTPUT); //Motor2 PWM
pinMode(motor2_dir, OUTPUT); //Motor3
digitalWrite(motor1_pwm,LOW);
digitalWrite(motor1_dir,LOW);
digitalWrite(motor2_pwm,LOW);
digitalWrite(motor2_dir,LOW);
setupBlueToothConnection();
}
void loop()
{
if(blueToothSerial.available()){ //check if the pipe is free
recvChar = blueToothSerial.read();
switch (recvChar){
case '#': //go forward
analogWrite(motor1_pwm,150);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,150);
digitalWrite(motor2_dir,LOW);
delay(250);
analogWrite(motor1_pwm,180);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,180);
digitalWrite(motor2_dir,LOW);
delay(250);
break;
case 'r': //go right
analogWrite(motor1_pwm,150);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,0);
digitalWrite(motor2_dir,LOW);
delay(250);
analogWrite(motor1_pwm,180);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,0);
digitalWrite(motor2_dir,LOW);
delay(250);
break;
case 'l': //go left
analogWrite(motor1_pwm,0);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,150);
digitalWrite(motor2_dir,LOW);
delay(250);
analogWrite(motor1_pwm,0);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,180);
digitalWrite(motor2_dir,LOW);
delay(250);
break;
case 's': //stop
analogWrite(motor1_pwm,0);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,0);
digitalWrite(motor2_dir,LOW);
delay(250);
analogWrite(motor1_pwm,0);
digitalWrite(motor1_dir,LOW);
analogWrite(motor2_pwm,0);
digitalWrite(motor2_dir,LOW);
delay(250);
break;
default: break;
}
}
}
void setupBlueToothConnection(){
blueToothSerial.begin(9600); //Set BluetoothBee BaudRate to default baud rate 9600
delay(10); // This delay is required.
blueToothSerial.print("AT+RENEW"); //Restore all setup value to factory setup
delay(10); // This delay is required.
blueToothSerial.print("AT+ROLE0"); //make it a slave
delay(10); // This delay is required.
}
//ENDVideo






Cool, where can I get the solar cell? How much is it?
Hi,
The Solar Cells come as part of the RC Modeling, Printed, Printed Prime and Ultimate Blimp pack of Printoo on Kickstarter:
https://www.kickstarter.com/projects/1030661323/printoo-paper-thin-flexible-arduinotm-compatible-m
Thanks,
Manuel
ah okay, I just find it myself looking forward to the project
looking forward to the project